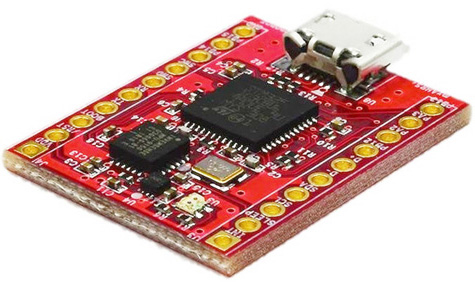
myAHRS+
High performance AHRS(Attitude Heading Reference System).
Its attitude output is more stable to acceleration and magnetic disturbances. Communication and configuration are enabled via UART/USB interface for user applications. I2C interface is available for embedded application like Arduino projects.
The GUI(myAHRS+ Monitor) is available, which allows users configure all myAHRS+ settings, view attitude of myAHRS+ and IMU(Inertial Measurement Unit) data in real time and save sensor data in a text file. Custom user software may be developed using the myAHRS+ SDK.
FEATURES:
The GUI(myAHRS+ Monitor) is available, which allows users configure all myAHRS+ settings, view attitude of myAHRS+ and IMU(Inertial Measurement Unit) data in real time and save sensor data in a text file. Custom user software may be developed using the myAHRS+ SDK.
FEATURES:
Sensors
– Triple axis 16-bit gyroscope : ± 2000 dps
– Triple axis 16-bit accelerometer : ± 16 g
– Triple axis 13-bit magnetometer : ± 1200 μTOn board software
– Extended Kalman filter
– max 100 Hz output rate
Attitude : Euler angle, Quaternion
Sensor : acceleration, rotation rate, magnetic fieldConnectivity
– USB : Virtual COM PORT
– UART : Standard baud rates up to 460800 bps
– I2C : up to 1kHzGUI(myAHRS+ Monitor)
– display attitude and sensor data from myAHRS+ on various viewers
– Configuration
– magnetometer calibration